Wenjing Margaret Mao
|

|
Research |

|
RoSHI: A Versatile Robot-oriented Suit for Human Data In-the-WildWenjing Mao*, Jefferson Ng*, Luyang Hu, Daniel Gehrig, Antonio Loquercio Under Review, 2025 RoSHI is a hybrid motion-capturing system that enables large-scale, in-the-wild human-to-robot data collection, supporting not only motion imitation but also the training of robot behaviors from human data. |
|
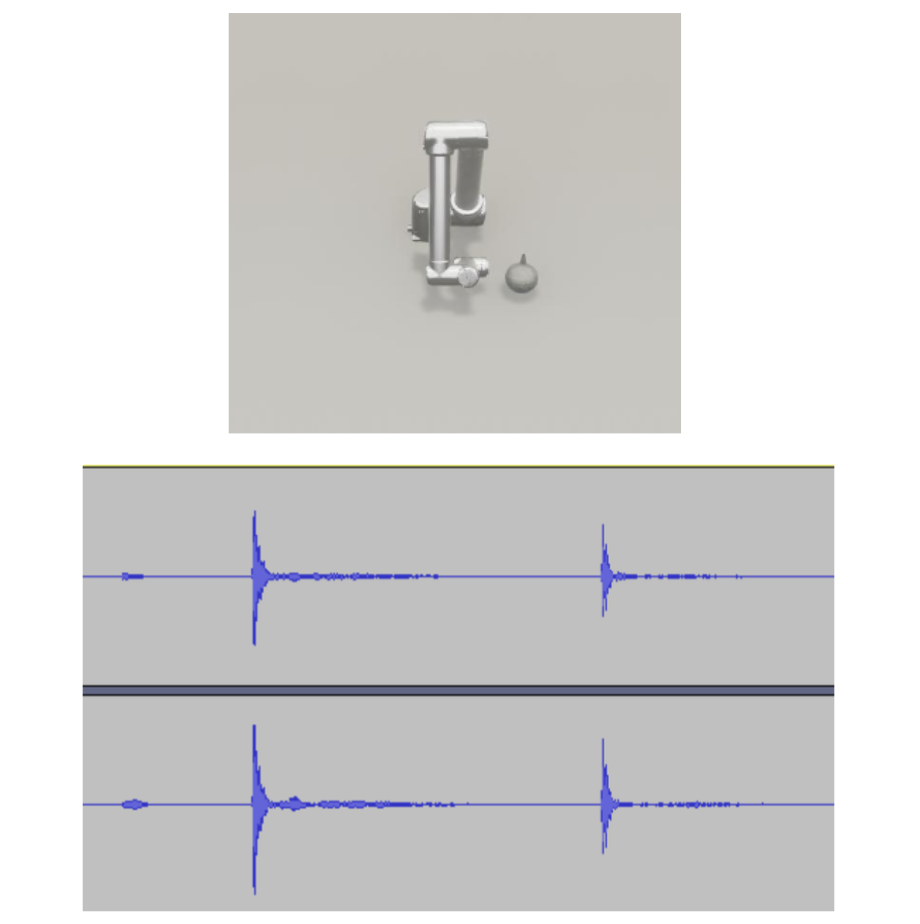
Audio Perception in Robot ManipulationWenjing Mao, Xinqi Zou, Lerrel Pinto Bacheler Thesis, 2023 This project explores how principles of movement sonification (the mapping of motion to sound) can inspire more perceptive and adaptive robotic systems. By analyzing how auditory cues convey contact forces during manipulation, I examined how sound can complement visual feedback in robot learning. The study highlights the potential of integrating audio perception into multimodal robot representations, bridging insights from human motor cognition and embodied AI. |
Selected Projects |
|
ParkourBot: Adaptive Locomotion & Obstacle Navigation via Hierarchical Reinforcement LearningUPenn ESE 6500 Learning in Robotics video / code / ParkourBot extends the Unitree RL Gym with a two-tier hierarchical reinforcement learning pipeline that enables a Unitree G1 quadruped to walk and high-step through dense, obstacle-rich mazes. A high-level Q-learning planner reasons over a 3-D grid map to coordinate specialised low-level PPO gait controllers, producing parkour-style movements in simulation. |
|
Dynamic Pick-and-Place Motion Planning with Franka ArmUPenn MEAM 5200 Introduction to Robotics Course In this project, our system autonomously performs a dynamic pick-and-place-and-stack task for both static and moving objects. By integrating vision and advanced motion planning, we achieve high-precision manipulation capable of stacking cubes on both stationary and rotating platforms.Dynamic pick-and-place motion planning for robotic manipulation using the Franka arm. This project focuses on real-time motion planning and control for complex manipulation tasks. |
|
Autonomous F1TENTH Car RacingUPenn ESE 6150 F1TENTH Autonomous Racing Cars Developed three stages of an autonomous F1TENTH race car using Follow-the-Gap, Pure Pursuit, and MPPI algorithms, ranging from closed-track racing without racing lines to extreme racing-line following and head-to-head competition on complex outdoor tracks. Achieved real-time racing and obstacle avoidance through full perception–planning–control integration in ROS 2, enabling dynamic lane switching and overtaking. |
|
Sokoban Bot: An LLM Agent for Object Pushing NavigationUPenn ESE 6150 F1TENTH Autonomous Racing Cars video / Developed an LLM-grounded navigation agent integrating reasoning-based path planning and feedback correction for object- pushing tasks, enabling the F1TENTH car to interpret grid maps, plan obstacle-free trajectories, and iteratively refine actions through error-aware memory in ROS 2. |
|
Design and source code from Jon Barron's website |